Overview
AUV 5.0 is the newest iteration of Bumblebee’s Autonomous Underwater Vehicle (AUV) to increase our AUV’s capabilities and efficiency in completing task for competitions. This is also a follow up from the MiniAUV project that we developed for Robosub 2025, where we tested new sensors, peripherals and thruster configurations.
I am currently working with my team on AUV 5.0’s full electrical stack to upgrade the overall power and communications architecture significantly.
What we are working on:
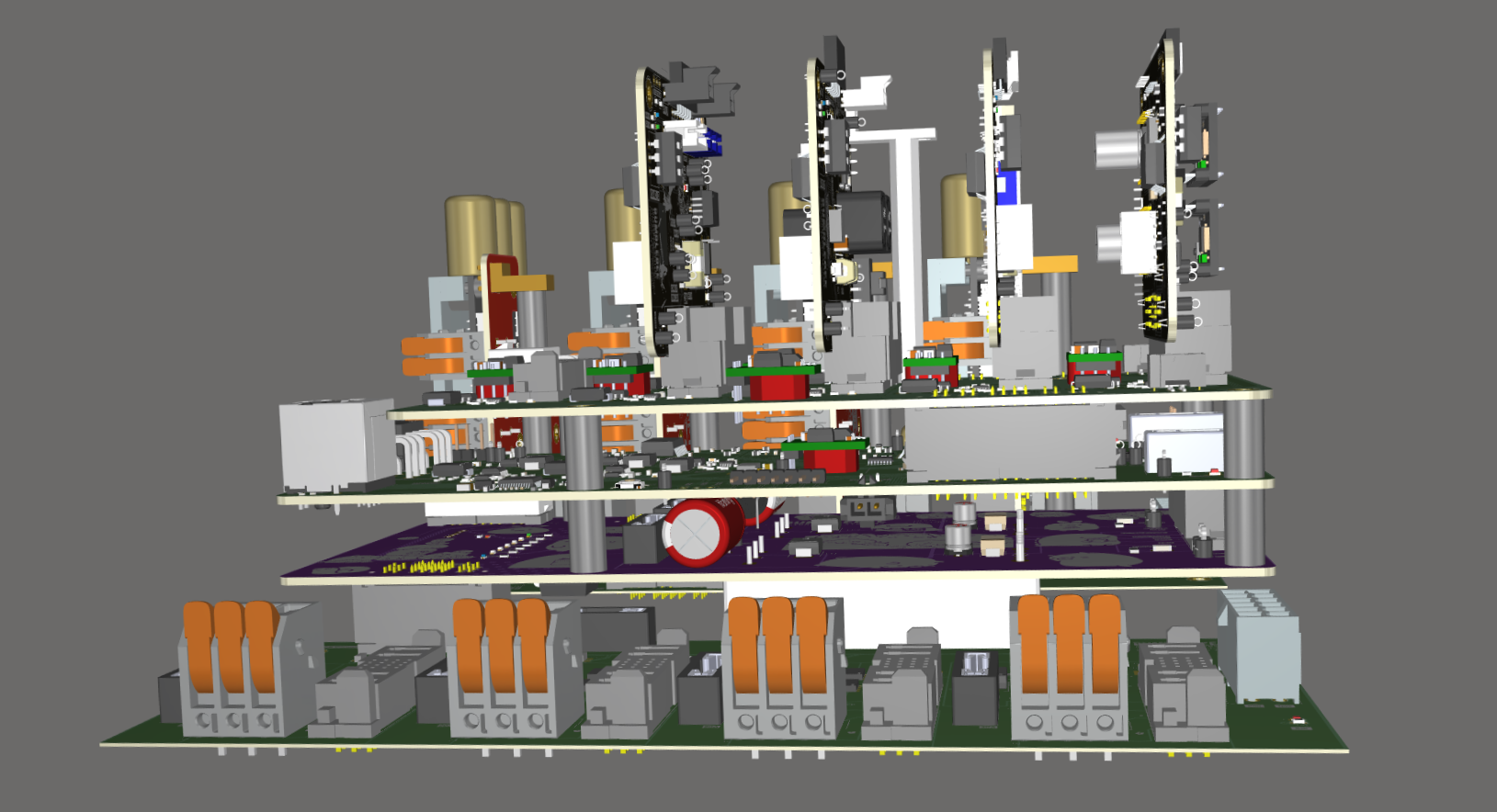
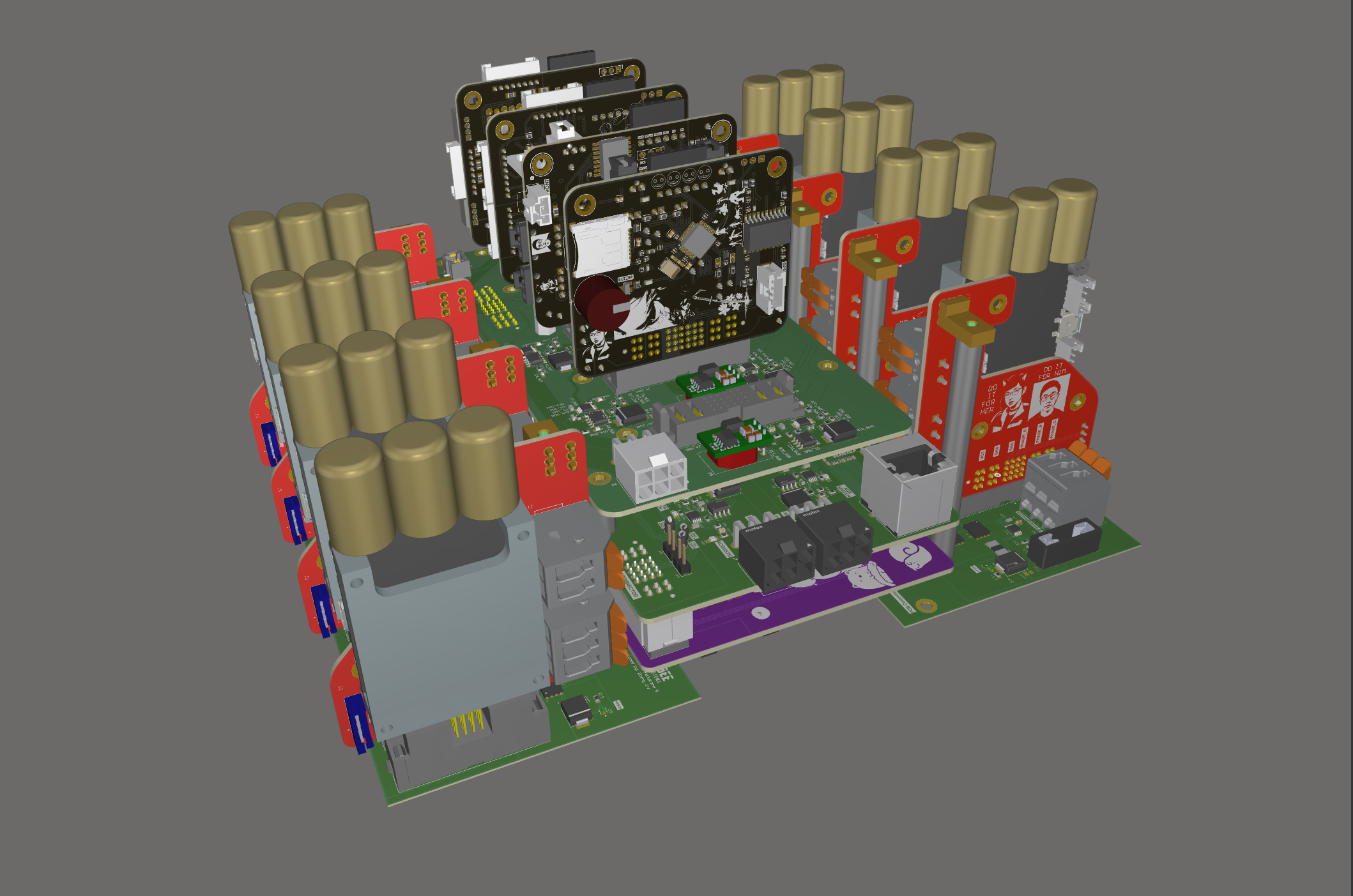
AUV 5.0 Electrical Stack (WIP)
- Power distribution and protection
- VESC, Sensors, Actuators, Compute Stack interfacing
- Firmware for all MCUs on the various PCBs
- Communications
- Integration, and bring-up
PCBs
These are my latest two PCBs for AUV 5.0, which are still in development and testing stages:
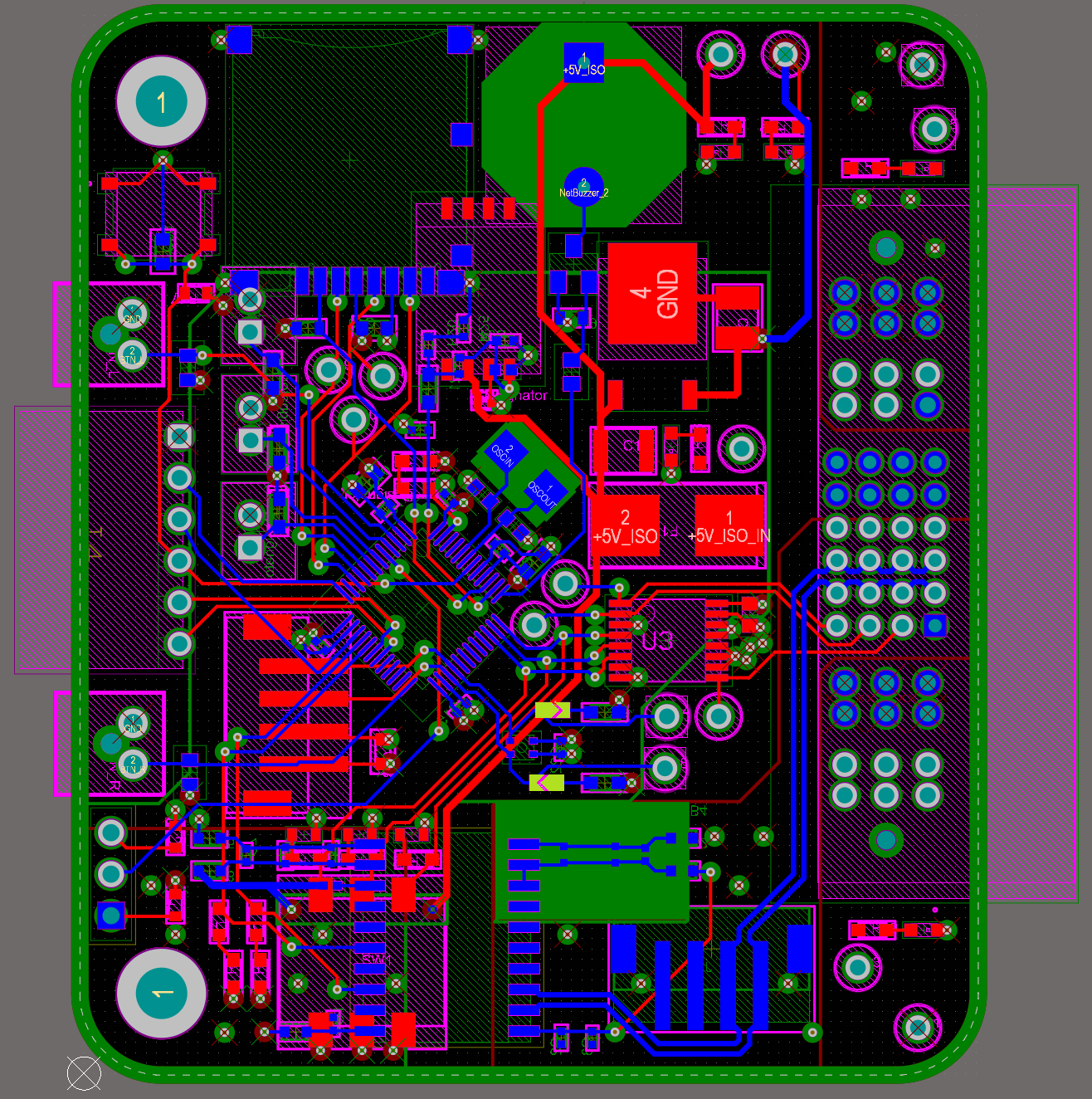
4 Layer PCB (Polygons shelved) - Sensors Board
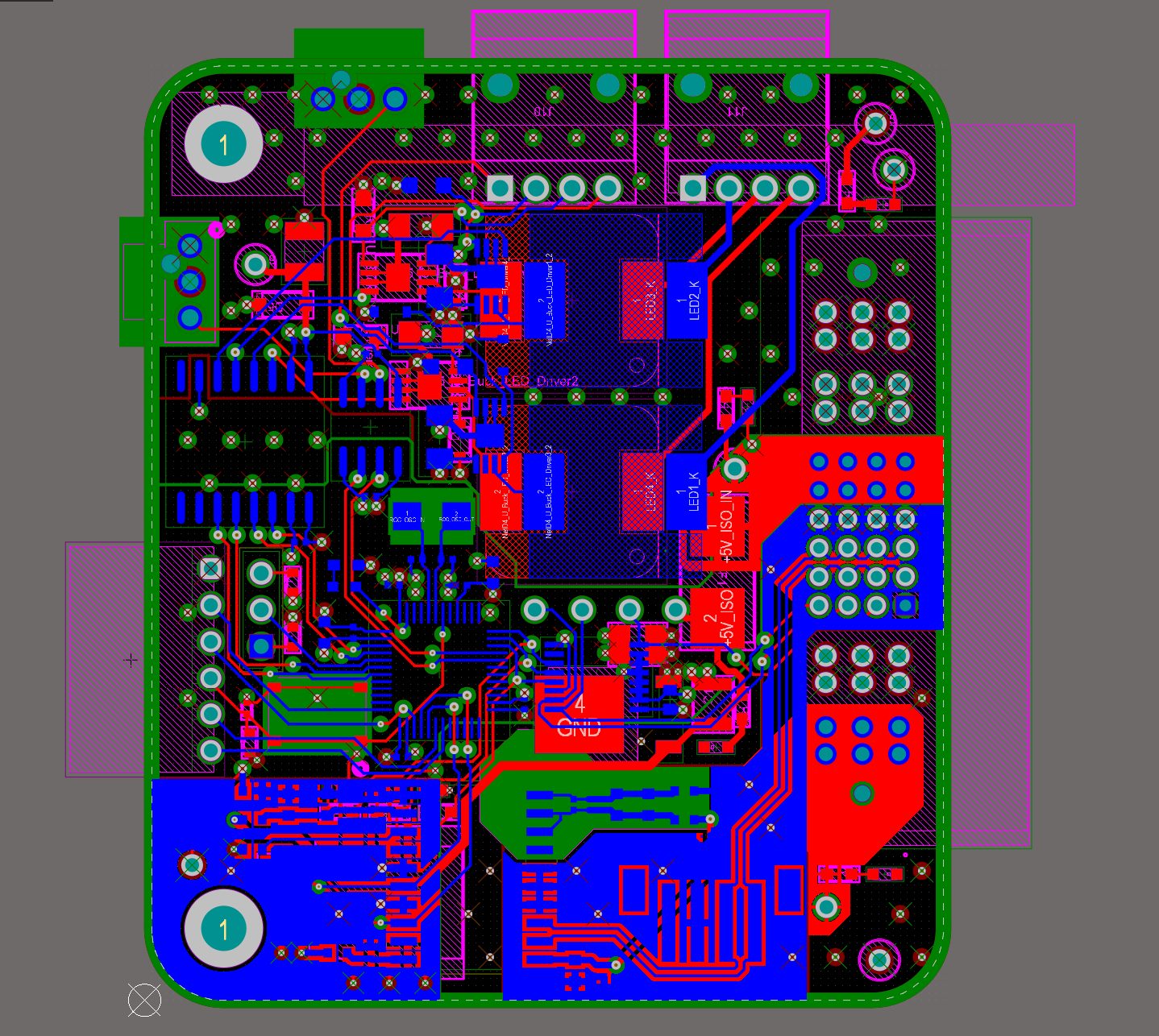
4 Layer PCB (Polygons shelved) - Lights Control Board
You will need to wait for a while for the full writeup!
Well, the developments are exciting and so is reveal of this project’s performance during the competition itself!