Overview
Co-Lead Developer & Engineer
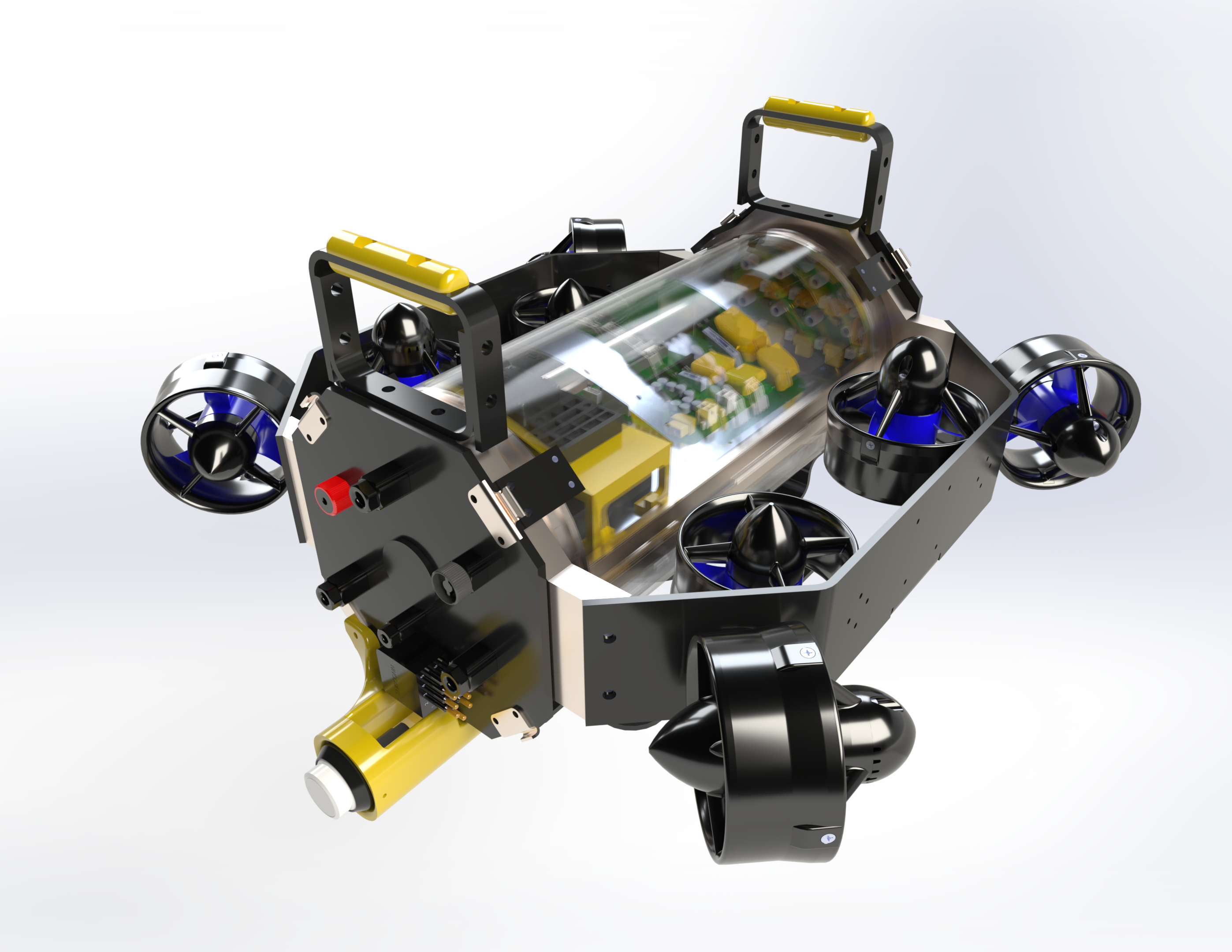
As part of the dual-vehicle strategy, I co-led the development of a specialised Mini-AUV in one summer, designed for movement-focused challenges such as the Gate and Slalom task. Achieved with its lighter build (13kg, a 66% reduction from the main AUV) and an optimized hydrodynamics with a 50% reduction in hull space and 8-thruster layout configuration for enhanced maneuverability.
Notable Electrical Designs:
- Designed a parallel MOSFET Design for its main power switch, with reed switch compatibility.
- Implemented a signal-based killswitch for ESCs via SN74HC4066 Quadruple Bilateral Analog Switch
- Developed telemetry using ESP32-S3-DEVKITC-1, displaying sensor data (pressure, battery voltage from INA219 power monitor, killswitch state) via OLED screen.
- Designed compact PCBs to optimise hull space efficiency.
Software and Sensors:
- Integrated DVL A50 by Waterlinked, Bar30 depth sensor and DWE Explore HD 3.0 underwater camera for navigation and perception.
- Configured Pixhawk 6X with Ardusub firmware for control and localisation.
- Using vision and ML for perception of Gate and Slalom
- Established MAVROS communication between Pixhawk flight controller and Jetson SBC.
Final Achieved tasks for RoboSub 2025, contributing to NUS BBAS’ 1st Place in Robosub 2025:
- Gate: Pass through and Maintain control
- Gate: Coin Flip (start 90/180 degrees from gate)
- Gate: Style (barrel roll 8x90 degrees at gate)
- Channel (Slalom): Navigate through layers with correct channel at correct depth
This write up is still work-in-progress! Why not read the technical report and visit Bumblebee’s website first?
If you have any questions, feel free to reach out to me!
Highlights
TODO:
competition tasks dev timeline and process competition experience AAR