Overview
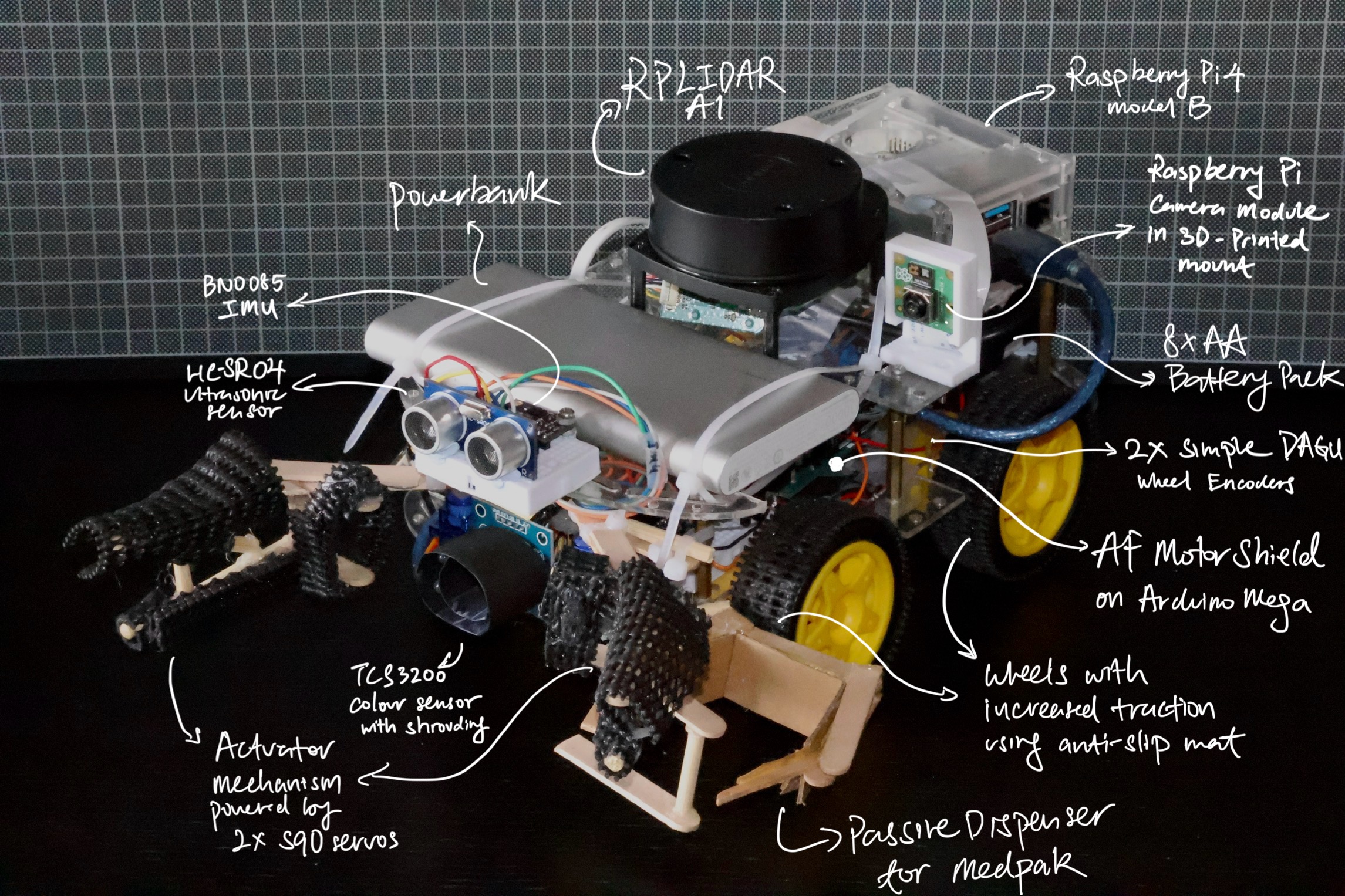
The robot is designed to be teleoperated by users using a keyboard in a separate room. Users are to perceive the robot’s environment using sensors and real-time mapping to search for two astronauts, delivering a care package to one and bringing the other to the safe zone, as fast as possible. • Integrated LiDAR, SLAM, RPi Camera and HC-SR04 for autonomous mapping and obstacle detection • Integrated BNO-085 IMU sensor for yaw/heading estimates, to turn accurately • Developed low-level firmware using bare-metal programming on Arduino Mega • Implemented TLS encryption for secure remote operation
This project fulfils the requirements of the final project for CG2111A: Engineering Principle and Practice II.
This write up is still work-in-progress! Why not watch read the report (under Documents on this page) in the meantime?
If you have any questions, feel free to reach out to me!